Appearance
ESP32上ModBus的使用-基于串口的从站
🚀 ESP32 ModBus通信 | 让设备与工业场景相适应!
- 💡 碎碎念😎:本文档记录如何实现 ESP32 + RS485模块实现ModBus从站
- 📺 视频教程:🚧 开发中
- 💾 示例程序:✅ [点击查看代码]
- 📚 官网文档:API 参考 » 应用层协议 » ESP-Modbus
- 💻 官方示例程序:esp-idf/examples/protocols/modbus
一、ModBus介绍
ModBus 是一种串行通信协议,广泛应用于工业自动化领域。ModBus 协议简单可靠,支持主从通信,可以用于连接不同设备和传感器进行数据交换。ModBus 主要有两种传输模式:ASCII 和 RTU。在工业应用中,RTU 模式更为常见,因为它具有更高的传输效率。
ModBus 协议的基本单位是寄存器,寄存器可以存储不同类型的数据,如输入/输出状态、模拟量、计数值等。每个从设备都有一个唯一的地址,主设备通过地址来识别从设备,并与其进行通信。
ModBus 可以通过多种物理介质进行传输,常见的有:
- RS485:一种差分信号传输方式,适用于长距离和噪声环境,常用于工业现场设备之间的通信。
- RS232:一种单端信号传输方式,适用于短距离通信,通常用于计算机和设备之间的通信。
- TCP/IP:基于以太网的通信方式,适用于网络环境,支持远程设备的连接和通信。
- RS422:一种差分信号传输方式,适用于长距离和高干扰环境,通常用于设备之间的通信。
本文档介绍基于RS485的情况:
二、使用官方历程
1. 硬件准备
- ESP32 开发板
- RS485 模块
- 接线:ESP32 的 UART 引脚连接到 RS485 模块,RS485 模块连接到 ModBus转USB模块并连接到电脑,如下:
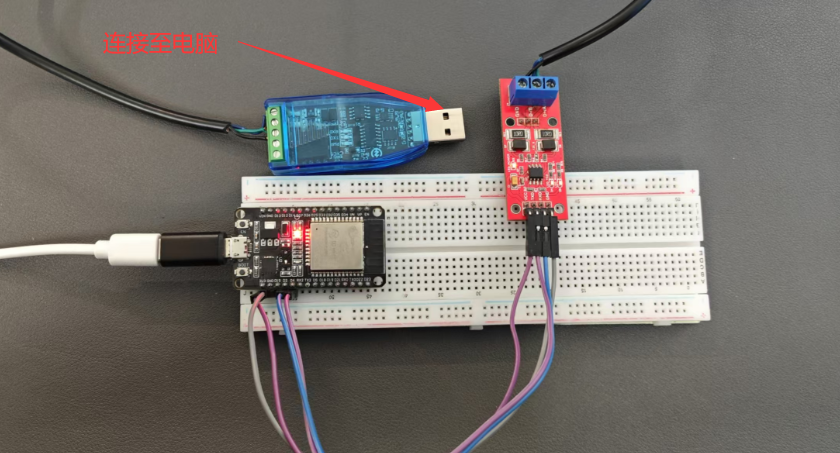 (这里RS485 模块连接至ESP32的串口2: Rx PIN: GPIO16 Tx PIN: GPIO17)
(这里RS485 模块连接至ESP32的串口2: Rx PIN: GPIO16 Tx PIN: GPIO17)
2. 烧录官方历程:
下载示例工程mb_slave,使用idf.py menuconfig命令配置工程:
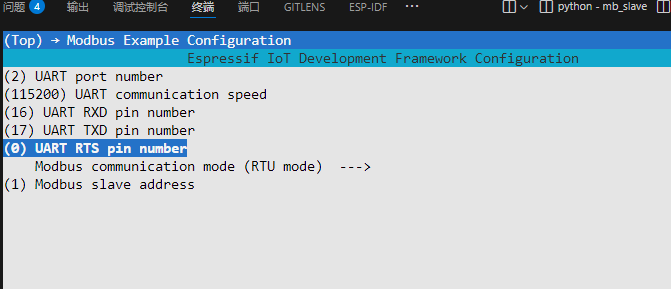
这里的UART RTS我没有,就暂时写0,烧录代码如下:

示例程序中配置了以下寄存器:
c
// Set register values into known state
static void setup_reg_data(void)
{
// Define initial state of parameters
discrete_reg_params.discrete_input0 = 1;
discrete_reg_params.discrete_input1 = 0;
discrete_reg_params.discrete_input2 = 1;
discrete_reg_params.discrete_input3 = 0;
discrete_reg_params.discrete_input4 = 1;
discrete_reg_params.discrete_input5 = 0;
discrete_reg_params.discrete_input6 = 1;
discrete_reg_params.discrete_input7 = 0;
holding_reg_params.holding_data0 = 1.34;
holding_reg_params.holding_data1 = 2.56;
holding_reg_params.holding_data2 = 3.78;
holding_reg_params.holding_data3 = 4.90;
holding_reg_params.holding_data4 = 5.67;
holding_reg_params.holding_data5 = 6.78;
holding_reg_params.holding_data6 = 7.79;
holding_reg_params.holding_data7 = 8.80;
coil_reg_params.coils_port0 = 0x55;
coil_reg_params.coils_port1 = 0xAA;
input_reg_params.input_data0 = 1.12;
input_reg_params.input_data1 = 2.34;
input_reg_params.input_data2 = 3.56;
input_reg_params.input_data3 = 4.78;
input_reg_params.input_data4 = 1.12;
input_reg_params.input_data5 = 2.34;
input_reg_params.input_data6 = 3.56;
input_reg_params.input_data7 = 4.78;
}整理为表格如下:
| 寄存器类型 | 起始地址 | 寄存器名称 | 数据类型 | 说明 |
|---|---|---|---|---|
| 保持寄存器(Holding Registers) | 0x0000 | holding_data0 | float | 读/写,初始值 1.34 |
| 0x0001 | holding_data1 | float | 读/写,初始值 2.56 | |
| 0x0002 | holding_data2 | float | 读/写,初始值 3.78 | |
| 0x0003 | holding_data3 | float | 读/写,初始值 4.90 | |
| 0x0004 | holding_data4 | float | 读/写,初始值 5.67 | |
| 0x0005 | holding_data5 | float | 读/写,初始值 6.78 | |
| 0x0006 | holding_data6 | float | 读/写,初始值 7.79 | |
| 0x0007 | holding_data7 | float | 读/写,初始值 8.80 | |
| 输入寄存器(Input Registers) | 0x0000 | input_data0 | float | 只读,初始值 1.12 |
| 0x0001 | input_data1 | float | 只读,初始值 2.34 | |
| 0x0002 | input_data2 | float | 只读,初始值 3.56 | |
| 0x0003 | input_data3 | float | 只读,初始值 4.78 | |
| 0x0004 | input_data4 | float | 只读,初始值 1.12 | |
| 0x0005 | input_data5 | float | 只读,初始值 2.34 | |
| 0x0006 | input_data6 | float | 只读,初始值 3.56 | |
| 0x0007 | input_data7 | float | 只读,初始值 4.78 | |
| 线圈(Coils) | 0x0000 | coils_port0 | uint8_t | 读/写,初始值 0x55 (01010101) |
| 0x0001 | coils_port1 | uint8_t | 读/写,初始值 0xAA (10101010) | |
| 离散输入(Discrete Inputs) | 0x0000 | discrete_input0 | bool | 只读,初始值 1 |
| 0x0001 | discrete_input1 | bool | 只读,初始值 0 | |
| 0x0002 | discrete_input2 | bool | 只读,初始值 1 | |
| 0x0003 | discrete_input3 | bool | 只读,初始值 0 | |
| 0x0004 | discrete_input4 | bool | 只读,初始值 1 | |
| 0x0005 | discrete_input5 | bool | 只读,初始值 0 | |
| 0x0006 | discrete_input6 | bool | 只读,初始值 1 | |
| 0x0007 | discrete_input7 | bool | 只读,初始值 0 |
我们可以使用ModBus调试软件Modbus调试助手查看ESP32的ModBus从站信息:
读取离散输入:
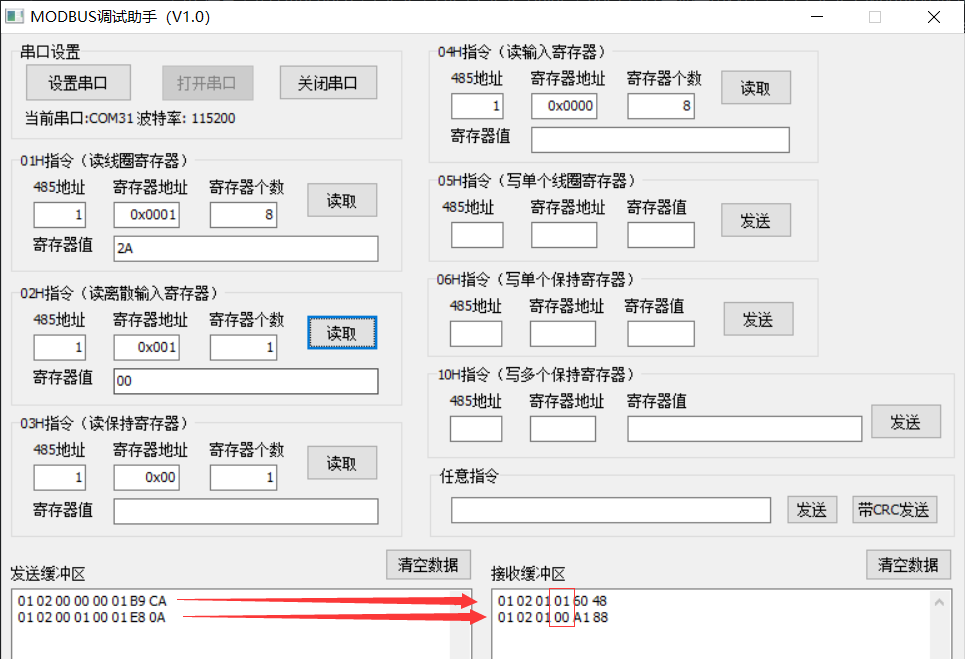
可以看到离散输入寄存器读取的值与示例代码里的默认值是一样的。
读取线圈寄存器1:
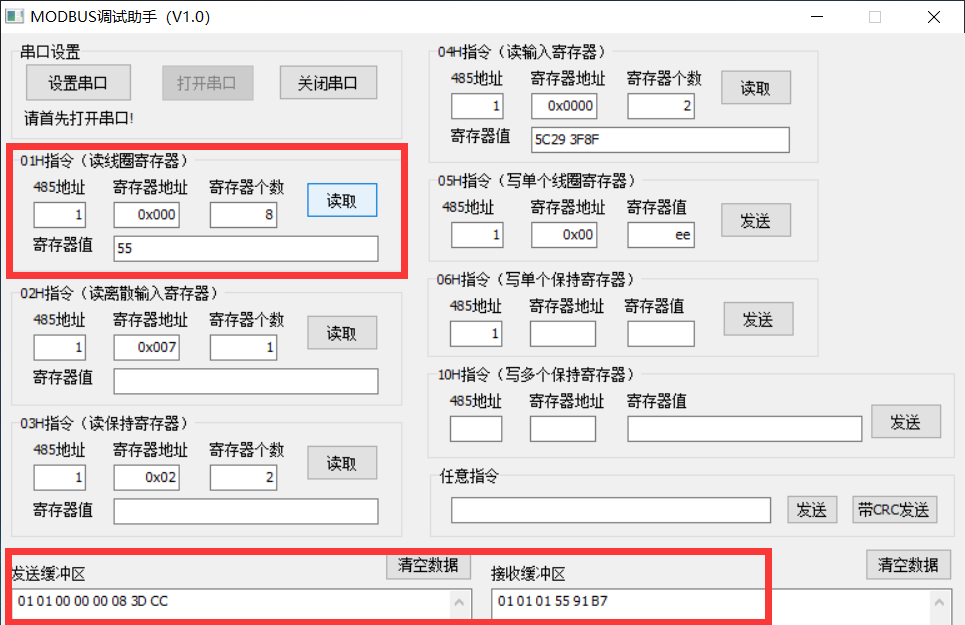
读到值为55,没有问题
读取输入寄存器1(浮点数):
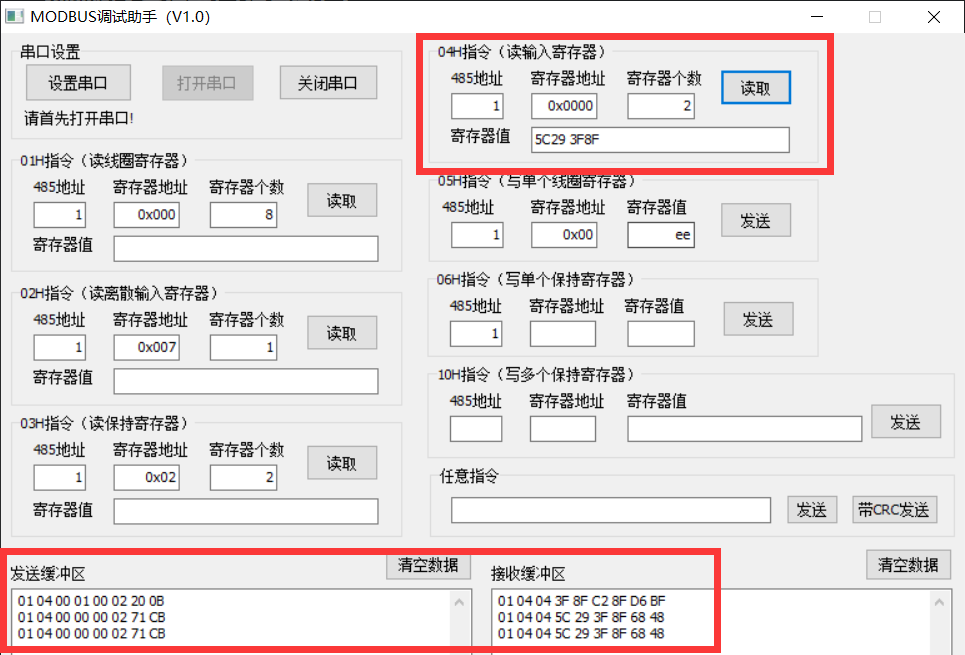
这里读取到的值为:5C29 3F8F
我们可以使用转换工具进行转换 https://tooltt.com/floatconverter/, 注意这里有字节反转(Byte Swap)

可以看到也是没有问题的。
示例程序中对读保持寄存器的事件进行了处理:
c
// The cycle below will be terminated when parameter holdingRegParams.dataChan0
// incremented each access cycle reaches the CHAN_DATA_MAX_VAL value.
for(;holding_reg_params.holding_data0 < MB_CHAN_DATA_MAX_VAL;) {
// Check for read/write events of Modbus master for certain events
(void)mbc_slave_check_event(MB_READ_WRITE_MASK);
ESP_ERROR_CHECK_WITHOUT_ABORT(mbc_slave_get_param_info(®_info, MB_PAR_INFO_GET_TOUT));
const char* rw_str = (reg_info.type & MB_READ_MASK) ? "READ" : "WRITE";
// Filter events and process them accordingly
if(reg_info.type & (MB_EVENT_HOLDING_REG_WR | MB_EVENT_HOLDING_REG_RD)) {
// Get parameter information from parameter queue
ESP_LOGI(TAG, "HOLDING %s (%" PRIu32 " us), ADDR:%u, TYPE:%u, INST_ADDR:0x%" PRIx32 ", SIZE:%u",
rw_str,
reg_info.time_stamp,
(unsigned)reg_info.mb_offset,
(unsigned)reg_info.type,
(uint32_t)reg_info.address,
(unsigned)reg_info.size);
if (reg_info.address == (uint8_t*)&holding_reg_params.holding_data0)
{
portENTER_CRITICAL(¶m_lock);
holding_reg_params.holding_data0 += MB_CHAN_DATA_OFFSET;
if (holding_reg_params.holding_data0 >= (MB_CHAN_DATA_MAX_VAL - MB_CHAN_DATA_OFFSET)) {
coil_reg_params.coils_port1 = 0xFF;
}
portEXIT_CRITICAL(¶m_lock);
}
} else if (reg_info.type & MB_EVENT_INPUT_REG_RD) {
ESP_LOGI(TAG, "INPUT READ (%" PRIu32 " us), ADDR:%u, TYPE:%u, INST_ADDR:0x%" PRIx32 ", SIZE:%u",
reg_info.time_stamp,
(unsigned)reg_info.mb_offset,
(unsigned)reg_info.type,
(uint32_t)reg_info.address,
(unsigned)reg_info.size);
} else if (reg_info.type & MB_EVENT_DISCRETE_RD) {
ESP_LOGI(TAG, "DISCRETE READ (%" PRIu32 " us): ADDR:%u, TYPE:%u, INST_ADDR:0x%" PRIx32 ", SIZE:%u",
reg_info.time_stamp,
(unsigned)reg_info.mb_offset,
(unsigned)reg_info.type,
(uint32_t)reg_info.address,
(unsigned)reg_info.size);
} else if (reg_info.type & (MB_EVENT_COILS_RD | MB_EVENT_COILS_WR)) {
ESP_LOGI(TAG, "COILS %s (%" PRIu32 " us), ADDR:%u, TYPE:%u, INST_ADDR:0x%" PRIx32 ", SIZE:%u",
rw_str,
reg_info.time_stamp,
(unsigned)reg_info.mb_offset,
(unsigned)reg_info.type,
(uint32_t)reg_info.address,
(unsigned)reg_info.size);
if (coil_reg_params.coils_port1 == 0xFF) break;
}
}这段代码是一个Modbus从机的循环处理部分,主要负责监控并处理Modbus主机的读写请求。循环会一直运行,直到holding_reg_params.holding_data0达到最大值MB_CHAN_DATA_MAX_VAL。在每个循环周期内,它检查Modbus主机是否有读写请求,并根据请求类型(如保持寄存器、输入寄存器、离散输入、线圈等)进行相应处理。特别地,如果是对holding_data0的读写请求,会增加其值,并在达到最大值时触发某些动作(如设置线圈端口1的值为0xFF)。
下面我多次读取holding_data0:
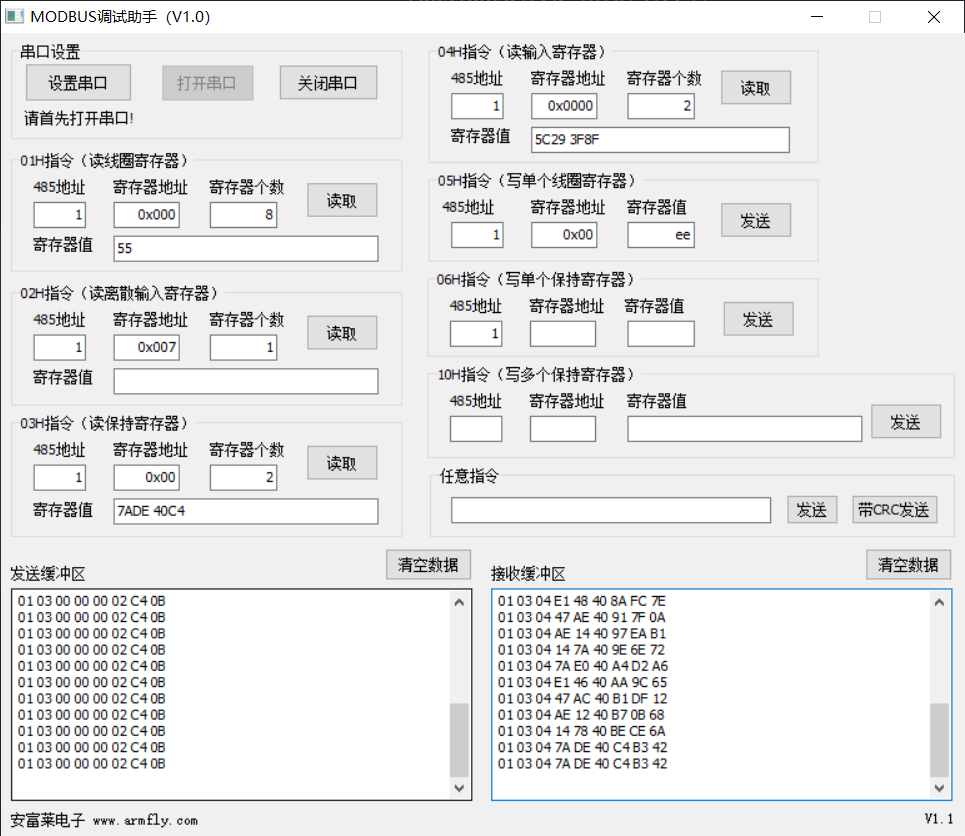
holding_reg_params.holding_data0达到最大值MB_CHAN_DATA_MAX_VAL时会退出程序
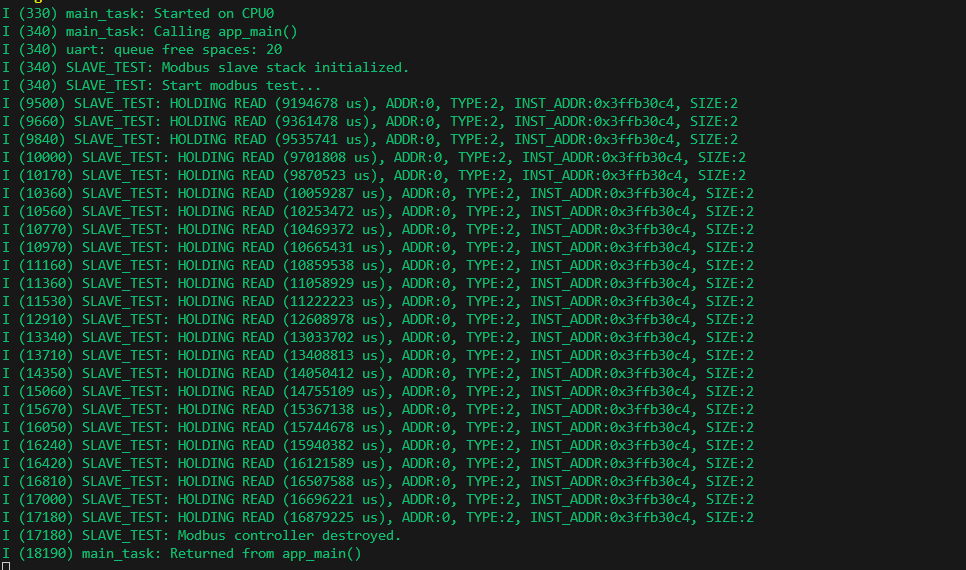
以上就是官方历程的使用,和现象。
三、官方示例程序分析
官方示例程序主要实现了以下功能:
- 初始化Modbus从站:调用
mbc_slave_init函数初始化Modbus控制器。设置通信参数并启动Modbus协议栈。 - 设置寄存器区域描述符: 使用
mbc_slave_set_descriptor函数初始化Modbus保持寄存器、输入寄存器、线圈和离散输入寄存器的区域描述符。 - 初始化寄存器数据:调用
setup_reg_data函数将寄存器值设置为已知状态。 - 启动Modbus控制器和协议栈:调用
mbc_slave_start函数启动Modbus控制器和协议栈。 - 处理Modbus主机的读写请求:通过循环监控并处理Modbus主机的读写请求。根据请求类型(如保持寄存器、输入寄存器、离散输入、线圈等)进行相应处理。
以下是每个步骤的详细分析:
1. 初始化Modbus从站
c
ESP_ERROR_CHECK(mbc_slave_init(MB_PORT_SERIAL_SLAVE, &mbc_slave_handler)); // Initialization of Modbus controller这行代码调用mbc_slave_init函数初始化Modbus控制器。MB_PORT_SERIAL_SLAVE表示使用串行端口作为Modbus通信端口,mbc_slave_handler是Modbus控制器的句柄。
2. 设置通信参数并启动Modbus协议栈
c
comm_info.mode = MB_MODE_RTU;
comm_info.slave_addr = MB_SLAVE_ADDR;
comm_info.port = MB_PORT_NUM;
comm_info.baudrate = MB_DEV_SPEED;
comm_info.parity = MB_PARITY_NONE;
ESP_ERROR_CHECK(mbc_slave_setup((void*)&comm_info));这段代码设置了Modbus从站的通信参数,包括通信模式(RTU)、从站地址、串口端口号、波特率和奇偶校验。然后调用mbc_slave_setup函数应用这些通信参数。
3. 设置寄存器区域描述符
c
reg_area.type = MB_PARAM_HOLDING;
reg_area.start_offset = MB_REG_HOLDING_START_AREA0;
reg_area.address = (void*)&holding_reg_params.holding_data0;
reg_area.size = (size_t)(HOLD_OFFSET(holding_data4) - HOLD_OFFSET(test_regs));
ESP_ERROR_CHECK(mbc_slave_set_descriptor(reg_area));这段代码为保持寄存器设置了区域描述符。reg_area.type表示寄存器类型为保持寄存器,reg_area.start_offset表示寄存器区域的起始偏移,reg_area.address是寄存器数据的存储地址,reg_area.size是寄存器区域的大小。然后调用mbc_slave_set_descriptor函数设置区域描述符。
4. 初始化寄存器数据
c
setup_reg_data();这行代码调用setup_reg_data函数初始化寄存器数据,将寄存器值设置为已知状态。
5. 启动Modbus控制器和协议栈
c
ESP_ERROR_CHECK(mbc_slave_start());这行代码调用mbc_slave_start函数启动Modbus控制器和协议栈。
6. 处理Modbus主机的读写请求
c
for(;holding_reg_params.holding_data0 < MB_CHAN_DATA_MAX_VAL;) {
(void)mbc_slave_check_event(MB_READ_WRITE_MASK);
ESP_ERROR_CHECK_WITHOUT_ABORT(mbc_slave_get_param_info(®_info, MB_PAR_INFO_GET_TOUT));
const char* rw_str = (reg_info.type & MB_READ_MASK) ? "READ" : "WRITE";
if(reg_info.type & (MB_EVENT_HOLDING_REG_WR | MB_EVENT_HOLDING_REG_RD)) {
ESP_LOGI(TAG, "HOLDING %s", rw_str);
if (reg_info.address == (uint8_t*)&holding_reg_params.holding_data0)
{
portENTER_CRITICAL(¶m_lock);
holding_reg_params.holding_data0 += MB_CHAN_DATA_OFFSET;
if (holding_reg_params.holding_data0 >= (MB_CHAN_DATA_MAX_VAL - MB_CHAN_DATA_OFFSET)) {
coil_reg_params.coils_port1 = 0xFF;
}
portEXIT_CRITICAL(¶m_lock);
}
}
}这段代码通过循环监控并处理Modbus主机的读写请求。它首先调用mbc_slave_check_event函数检查是否有读写事件,然后调用mbc_slave_get_param_info函数获取寄存器参数信息。根据请求类型(如保持寄存器、输入寄存器、离散输入、线圈等)进行相应处理。特别地,如果是对holding_data0的读写请求,会增加其值,并在达到最大值时触发某些动作(如设置线圈端口1的值为0xFF)。
三、修改示例程序:
下面我提供一个简洁版示例程序,去不必要的内容:
代码地址: https://github.com/DuRuofu/ESP32-Guide/tree/main/code/09.extra/modbus/serial/mb_slave
c
#include <stdio.h>
#include <stdint.h>
#include "esp_err.h"
#include "mbcontroller.h" // Modbus 控制器的定义和 API
#include "modbus_params.h" // Modbus 参数结构体
#include "esp_log.h" // 日志输出
#include "sdkconfig.h"
#define MB_PORT_NUM (CONFIG_MB_UART_PORT_NUM) // 用于 Modbus 连接的 UART 端口号
#define MB_SLAVE_ADDR (CONFIG_MB_SLAVE_ADDR) // 设备在 Modbus 网络中的地址
#define MB_DEV_SPEED (CONFIG_MB_UART_BAUD_RATE) // UART 通信速率
// 注意:某些芯片的特定引脚无法用于 UART 通信。
// 请参考所选开发板和目标设备的文档,并使用 Kconfig 进行正确的引脚配置。
// 以下宏定义了 Modbus 各类寄存器的起始地址
#define HOLD_OFFSET(field) ((uint16_t)(offsetof(holding_reg_params_t, field) >> 1)) // 获取保持寄存器字段的偏移量
#define INPUT_OFFSET(field) ((uint16_t)(offsetof(input_reg_params_t, field) >> 1)) // 获取输入寄存器字段的偏移量
#define MB_REG_DISCRETE_INPUT_START (0x0000) // 离散输入寄存器起始地址
#define MB_REG_COILS_START (0x0000) // 线圈寄存器起始地址
#define MB_REG_INPUT_START_AREA0 (INPUT_OFFSET(input_data0)) // 输入寄存器区域 0 起始地址
#define MB_REG_INPUT_START_AREA1 (INPUT_OFFSET(input_data4)) // 输入寄存器区域 1 起始地址
#define MB_REG_HOLDING_START_AREA0 (HOLD_OFFSET(holding_data0)) // 保持寄存器区域 0 起始地址
#define MB_REG_HOLDING_START_AREA1 (HOLD_OFFSET(holding_data4)) // 保持寄存器区域 1 起始地址
#define MB_PAR_INFO_GET_TOUT (10) // 获取参数信息的超时时间(单位:ms)
#define MB_CHAN_DATA_MAX_VAL (6) // 通道数据的最大值
#define MB_CHAN_DATA_OFFSET (0.2f) // 通道数据的偏移量
// Modbus 读操作事件掩码
#define MB_READ_MASK (MB_EVENT_INPUT_REG_RD | MB_EVENT_HOLDING_REG_RD | MB_EVENT_DISCRETE_RD | MB_EVENT_COILS_RD)
// Modbus 写操作事件掩码
#define MB_WRITE_MASK (MB_EVENT_HOLDING_REG_WR | MB_EVENT_COILS_WR)
// Modbus 读写操作事件掩码
#define MB_READ_WRITE_MASK (MB_READ_MASK | MB_WRITE_MASK)
// 日志 TAG
static const char *TAG = "SLAVE_TEST";
static portMUX_TYPE param_lock = portMUX_INITIALIZER_UNLOCKED;
// 设置寄存器初始值
static void setup_reg_data(void)
{
// 初始化离散输入寄存器
discrete_reg_params.discrete_input0 = 1;
discrete_reg_params.discrete_input1 = 0;
discrete_reg_params.discrete_input2 = 1;
discrete_reg_params.discrete_input3 = 0;
discrete_reg_params.discrete_input4 = 1;
discrete_reg_params.discrete_input5 = 0;
discrete_reg_params.discrete_input6 = 1;
discrete_reg_params.discrete_input7 = 0;
// 初始化保持寄存器
holding_reg_params.holding_data0 = 1.34;
holding_reg_params.holding_data1 = 2.56;
holding_reg_params.holding_data2 = 3.78;
holding_reg_params.holding_data3 = 4.90;
holding_reg_params.holding_data4 = 5.67;
holding_reg_params.holding_data5 = 6.78;
holding_reg_params.holding_data6 = 7.79;
holding_reg_params.holding_data7 = 8.80;
// 初始化线圈寄存器
coil_reg_params.coils_port0 = 0x55;
coil_reg_params.coils_port1 = 0xAA;
// 初始化输入寄存器
input_reg_params.input_data0 = 1.12;
input_reg_params.input_data1 = 2.34;
input_reg_params.input_data2 = 3.56;
input_reg_params.input_data3 = 4.78;
input_reg_params.input_data4 = 1.12;
input_reg_params.input_data5 = 2.34;
input_reg_params.input_data6 = 3.56;
input_reg_params.input_data7 = 4.78;
}
// Modbus 从设备示例应用,基于 FreeModbus 协议栈。
// 设备参数定义在 deviceparams.h 文件中。
void app_main(void)
{
mb_param_info_t reg_info; // Modbus 寄存器访问信息
mb_communication_info_t comm_info; // Modbus 通信参数
mb_register_area_descriptor_t reg_area; // Modbus 寄存器区域描述符
// 设置日志等级
esp_log_level_set(TAG, ESP_LOG_INFO);
void *mbc_slave_handler = NULL;
// 初始化 Modbus 从机控制器
ESP_ERROR_CHECK(mbc_slave_init(MB_PORT_SERIAL_SLAVE, &mbc_slave_handler));
// 设置通信参数
#if CONFIG_MB_COMM_MODE_ASCII
comm_info.mode = MB_MODE_ASCII,
#elif CONFIG_MB_COMM_MODE_RTU
comm_info.mode = MB_MODE_RTU,
#endif
comm_info.slave_addr = MB_SLAVE_ADDR;
comm_info.port = MB_PORT_NUM;
comm_info.baudrate = MB_DEV_SPEED;
comm_info.parity = MB_PARITY_NONE;
ESP_ERROR_CHECK(mbc_slave_setup((void *)&comm_info));
// 初始化 Modbus 寄存器区域
reg_area.type = MB_PARAM_HOLDING;
reg_area.start_offset = MB_REG_HOLDING_START_AREA0;
reg_area.address = (void *)&holding_reg_params.holding_data0;
reg_area.size = (size_t)(HOLD_OFFSET(holding_data4) - HOLD_OFFSET(test_regs));
ESP_ERROR_CHECK(mbc_slave_set_descriptor(reg_area));
reg_area.type = MB_PARAM_HOLDING;
reg_area.start_offset = MB_REG_HOLDING_START_AREA1;
reg_area.address = (void *)&holding_reg_params.holding_data4;
reg_area.size = sizeof(float) << 2;
ESP_ERROR_CHECK(mbc_slave_set_descriptor(reg_area));
// 初始化输入寄存器
reg_area.type = MB_PARAM_INPUT;
reg_area.start_offset = MB_REG_INPUT_START_AREA0;
reg_area.address = (void *)&input_reg_params.input_data0;
reg_area.size = sizeof(float) << 2;
ESP_ERROR_CHECK(mbc_slave_set_descriptor(reg_area));
reg_area.type = MB_PARAM_INPUT;
reg_area.start_offset = MB_REG_INPUT_START_AREA1;
reg_area.address = (void *)&input_reg_params.input_data4;
reg_area.size = sizeof(float) << 2;
ESP_ERROR_CHECK(mbc_slave_set_descriptor(reg_area));
// 初始化线圈寄存器
reg_area.type = MB_PARAM_COIL;
reg_area.start_offset = MB_REG_COILS_START;
reg_area.address = (void *)&coil_reg_params;
reg_area.size = sizeof(coil_reg_params);
ESP_ERROR_CHECK(mbc_slave_set_descriptor(reg_area));
// 初始化离散输入寄存器
reg_area.type = MB_PARAM_DISCRETE;
reg_area.start_offset = MB_REG_DISCRETE_INPUT_START;
reg_area.address = (void *)&discrete_reg_params;
reg_area.size = sizeof(discrete_reg_params);
ESP_ERROR_CHECK(mbc_slave_set_descriptor(reg_area));
setup_reg_data(); // 设定初始值
// 启动 Modbus 从设备控制器
ESP_ERROR_CHECK(mbc_slave_start());
// 设置 UART 引脚
ESP_ERROR_CHECK(uart_set_pin(MB_PORT_NUM, CONFIG_MB_UART_TXD,
CONFIG_MB_UART_RXD, CONFIG_MB_UART_RTS,
UART_PIN_NO_CHANGE));
// 设置 UART 为半双工模式
ESP_ERROR_CHECK(uart_set_mode(MB_PORT_NUM, UART_MODE_RS485_HALF_DUPLEX));
ESP_LOGI(TAG, "Modbus 从设备初始化完成。");
ESP_LOGI(TAG, "开始 Modbus 测试...");
}其中,各种寄存器的定义和声明放在modbus_slave_params组件中,modbus_params.h如下:
c
#ifndef _DEVICE_PARAMS
#define _DEVICE_PARAMS
#include <stdint.h>
// This file defines structure of modbus parameters which reflect correspond modbus address space
// for each modbus register type (coils, discreet inputs, holding registers, input registers)
#pragma pack(push, 1)
typedef struct
{
uint8_t discrete_input0:1;
uint8_t discrete_input1:1;
uint8_t discrete_input2:1;
uint8_t discrete_input3:1;
uint8_t discrete_input4:1;
uint8_t discrete_input5:1;
uint8_t discrete_input6:1;
uint8_t discrete_input7:1;
uint8_t discrete_input_port1;
uint8_t discrete_input_port2;
} discrete_reg_params_t;
#pragma pack(pop)
#pragma pack(push, 1)
typedef struct
{
uint8_t coils_port0;
uint8_t coils_port1;
uint8_t coils_port2;
} coil_reg_params_t;
#pragma pack(pop)
#pragma pack(push, 1)
typedef struct
{
float input_data0; // 0
float input_data1; // 2
float input_data2; // 4
float input_data3; // 6
uint16_t data[150]; // 8 + 150 = 158
float input_data4; // 158
float input_data5;
float input_data6;
float input_data7;
uint16_t data_block1[150];
} input_reg_params_t;
#pragma pack(pop)
#pragma pack(push, 1)
typedef struct
{
float holding_data0;
float holding_data1;
float holding_data2;
float holding_data3;
uint16_t test_regs[150];
float holding_data4;
float holding_data5;
float holding_data6;
float holding_data7;
} holding_reg_params_t;
#pragma pack(pop)
extern holding_reg_params_t holding_reg_params;
extern input_reg_params_t input_reg_params;
extern coil_reg_params_t coil_reg_params;
extern discrete_reg_params_t discrete_reg_params;
#endif // !defined(_DEVICE_PARAMS)定义了用于 Modbus 通信的各种寄存器参数结构体,包括离散输入、线圈寄存器、输入寄存器和保持寄存器。每个结构体都定义了相应的参数字段,并声明了外部变量以便在其他文件中访问这些实例。
modbus_params.c如下:
c
#include "modbus_params.h"
// Here are the user defined instances for device parameters packed by 1 byte
// These are keep the values that can be accessed from Modbus master
holding_reg_params_t holding_reg_params = { 0 };
input_reg_params_t input_reg_params = { 0 };
coil_reg_params_t coil_reg_params = { 0 };
discrete_reg_params_t discrete_reg_params = { 0 };定义了四个用于 Modbus 通信的参数存储实例,这些实例分别用于保持寄存器、输入寄存器、线圈寄存器和离散输入寄存器。每个实例都初始化为 0,以便在 Modbus 主机访问时有一个初始值。
综上,这就是对ESP32 ModBus从机的使用分析。